
👋 Hi there! Welcome to my website ✨
Note: I am currently looking for internship opportunities. Please feel free to contact me if you have any relevant positions available.
I am a joint PhD student at the University of Surrey (UoS), UK, and the University of Wollongong (UoW), Australia, working on resource- and data-efficient methods for 3D scene understanding. My research is supervised by Xiatian Zhu at UoS and Son Lam Phung at UoW, in collaboration with Lu Yin and Salim Bouzerdoum.
Before embarking on my PhD journey, I worked at MBZUAI in UAE, where I collaborated with Salman Khan and Fahad Khan on utilising foundational models for continual learning in image and point cloud understanding.
I completed my undergraduate studies at SGGS Institute of Engineering and Technology, Nanded in India. During my undergrad, I had the opportunity to spend six months at Nanyang Technological University (NTU), Singapore.
My research interests include:
- 3D computer vision
- Continual learning
- Multi-modal learning
- Efficient learning
Let’s connect about collaborations or exciting openings! Please contact me if you’d like to discuss potential work together.





🔥 News
- 2026.02: 🎉 SCOPE: Incremental Few-shot method for point cloud accpeted CVPR 2026 Findings.
- 2025.07: 🎉 CLIMB-3D accepted at BMVC 2025.
- 2025.06: Joined the University of Wollongong to complete the second phase of my PhD.
- 2025.02: CLIMB-3D preprint 📄 available here - feedback welcome.
- 2025.01: 📄 Preprint of my survey on foundational models for 3D available - read it here.
- 2024.08: Joined SUTD as a visiting PhD student under Dr Zhao Na.
- 2023.09: Joined the University of Surrey as a PhD student under Dr Xiatian Zhu.
- 2023.04: Continual-CLIP accepted at CVPR CLVision Workshop 2023.
- 2022.10: Continual-CLIP released on arXiv 📄.
- 2022.06: Joined MBZUAI as a Research Assistant under Dr Salman Khan.
- 2021.01: Married the love of my life, Shruti 💍.
- 2021.01: My homepage is now live 🎉.
📝 Publications
A full publication list is available on my Google Scholar page.
Publications
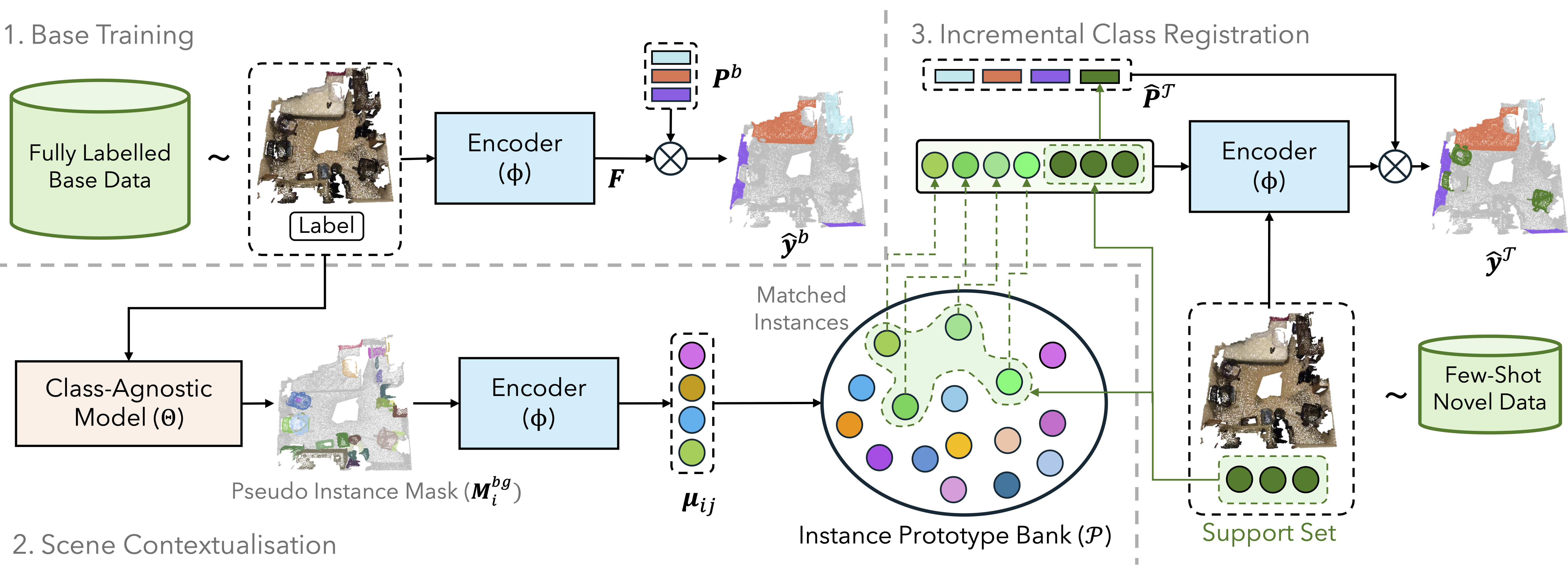
SCOPE: Scene-Contextualised Incremental Few-Shot 3D Segmentation
A framework that utilises background context to recognise novel classes in a sequential manner, without additional fine-tuning or introducing new parameters.
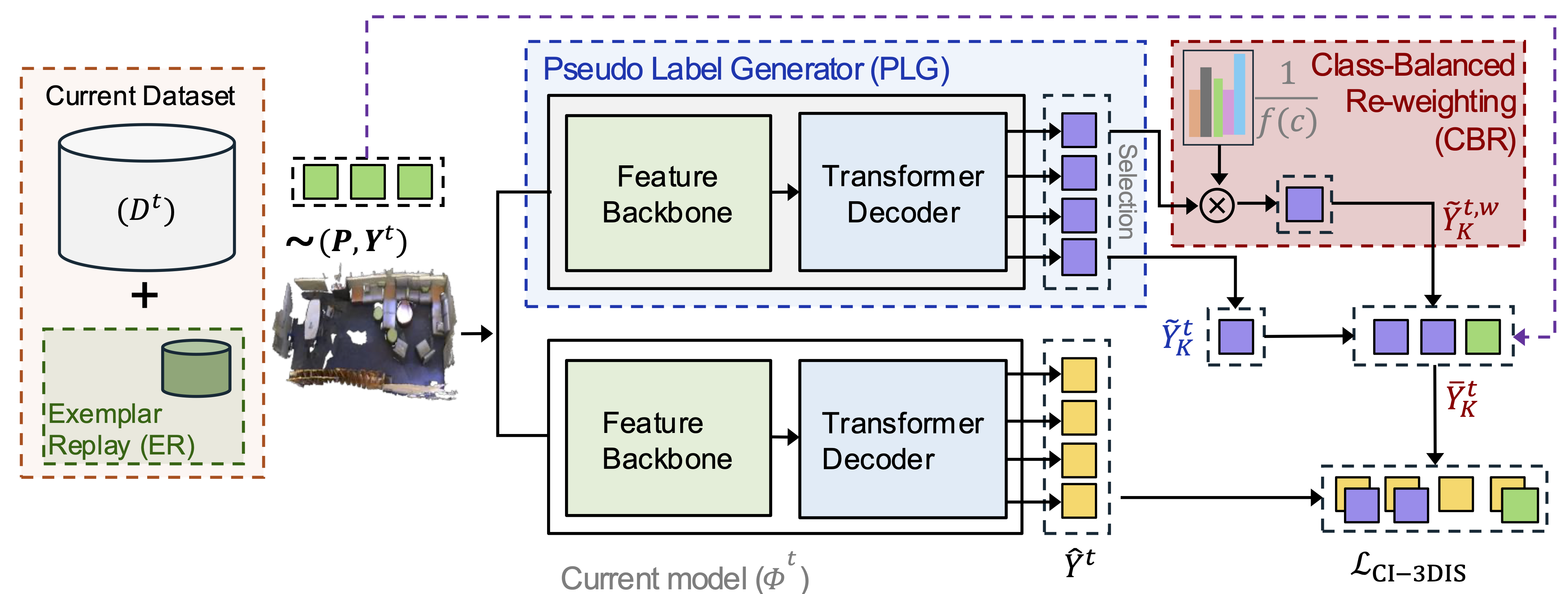
CLIMB-3D: Continual Learning for Imbalanced 3D Instance Segmentation
We introduce class-incremental learning for point cloud instance segmentation, with benchmarks from the long-tail ScanNet200 dataset. We also propose a module to address class imbalance and improve performance across frequent and rare classes..
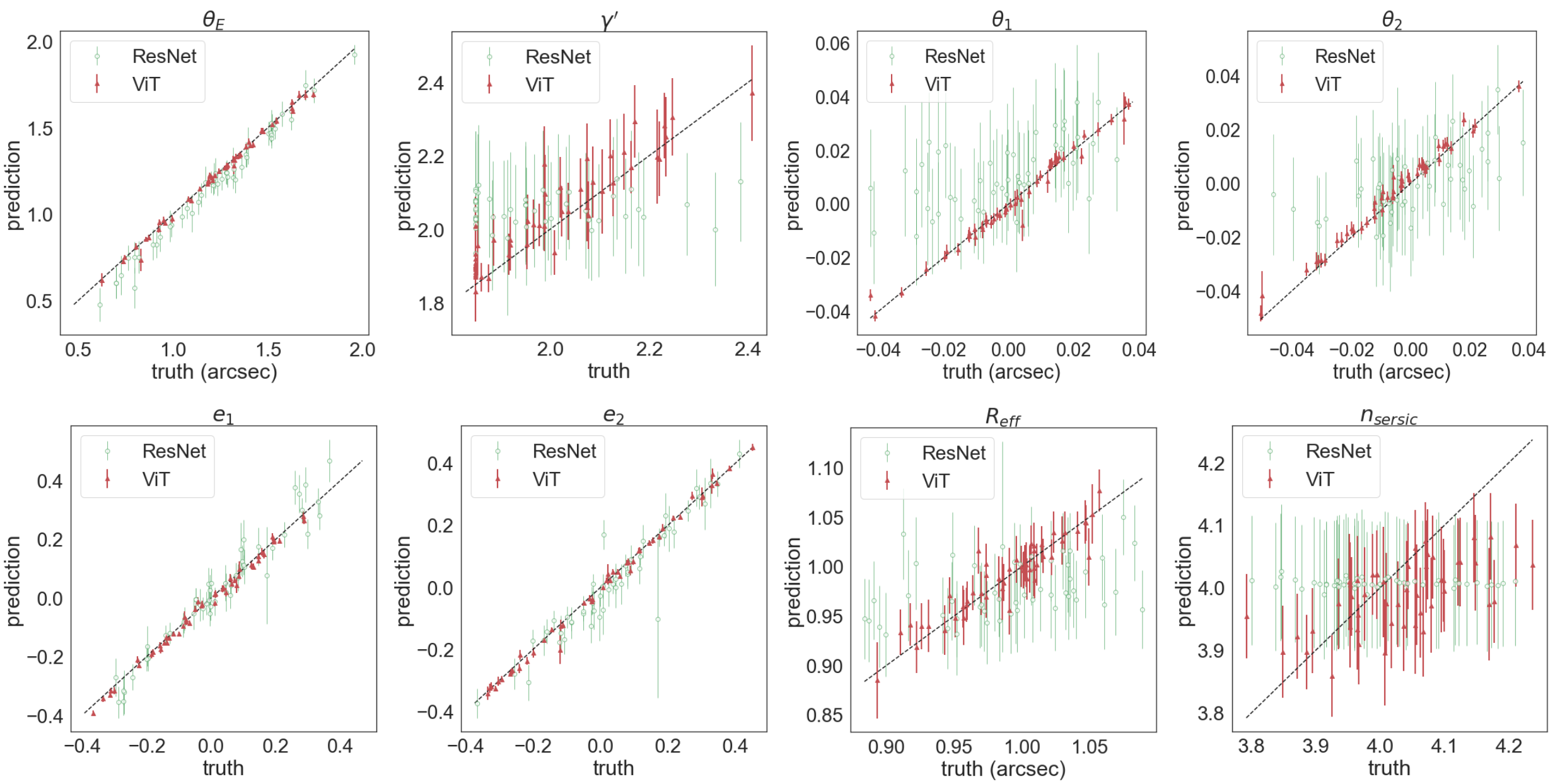
Strong Gravitational Lensing Parameter Estimation with Vision Transformer
We explore Vision Transformers (ViTs) for estimating parameters in simulated lensed quasar systems-offering a fast, competitive alternative to MCMC and CNNs. ViTs perform well on mass-related lensing parameters, showing promise for future lensing analyses.
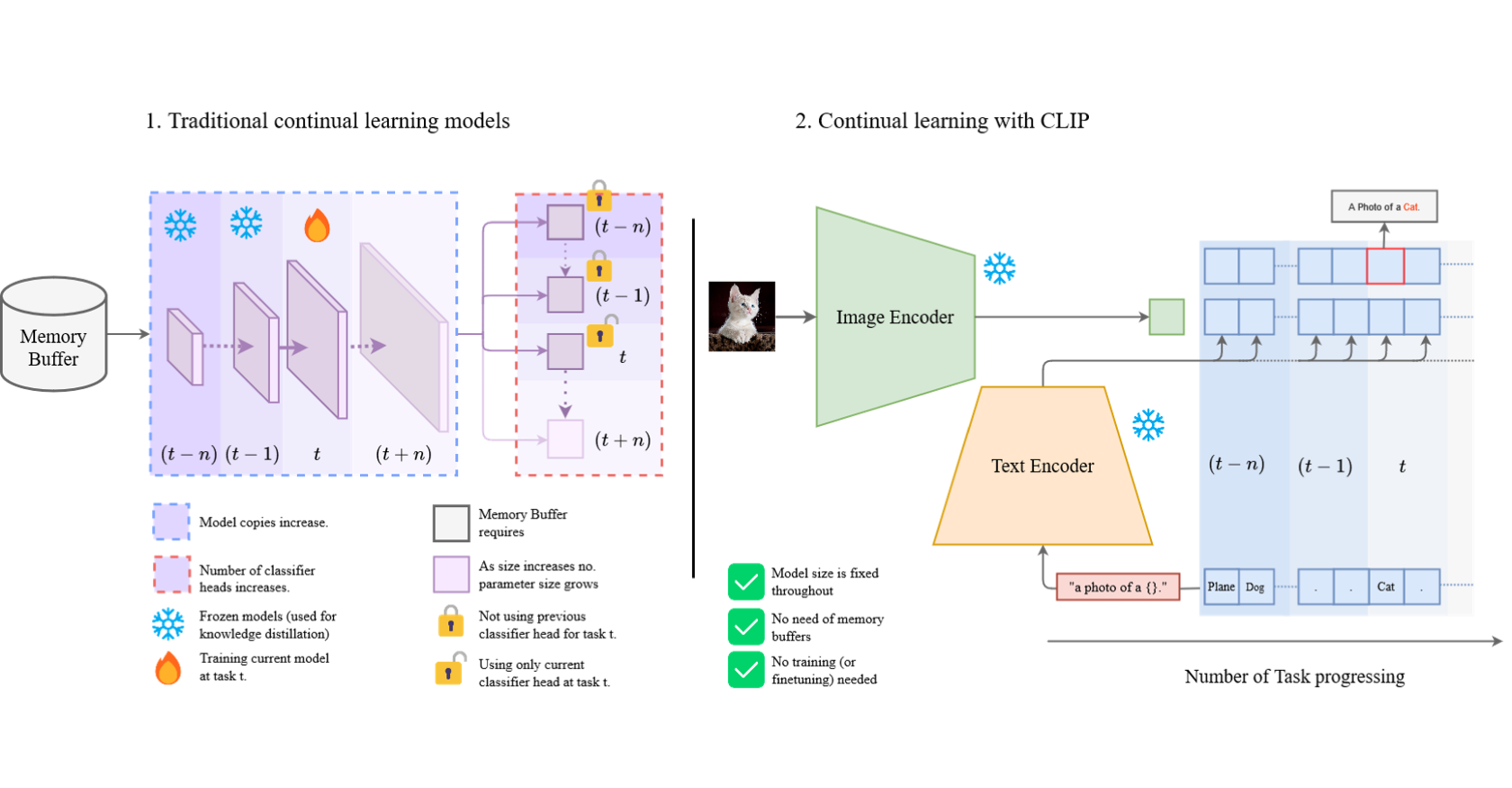
CLIP Model is an Efficient Continual Learner
This work demonstrates that a frozen CLIP model, evaluated in zero-shot mode, achieves SOTA performance across multiple continual learning settings without any fine-tuning. Tested on five benchmarks, CLIP surpasses existing methods while avoiding re-training, memory replay, or architectural tweaks, making it a strong and surprisingly simple baseline for future CL research.
Pre-prints
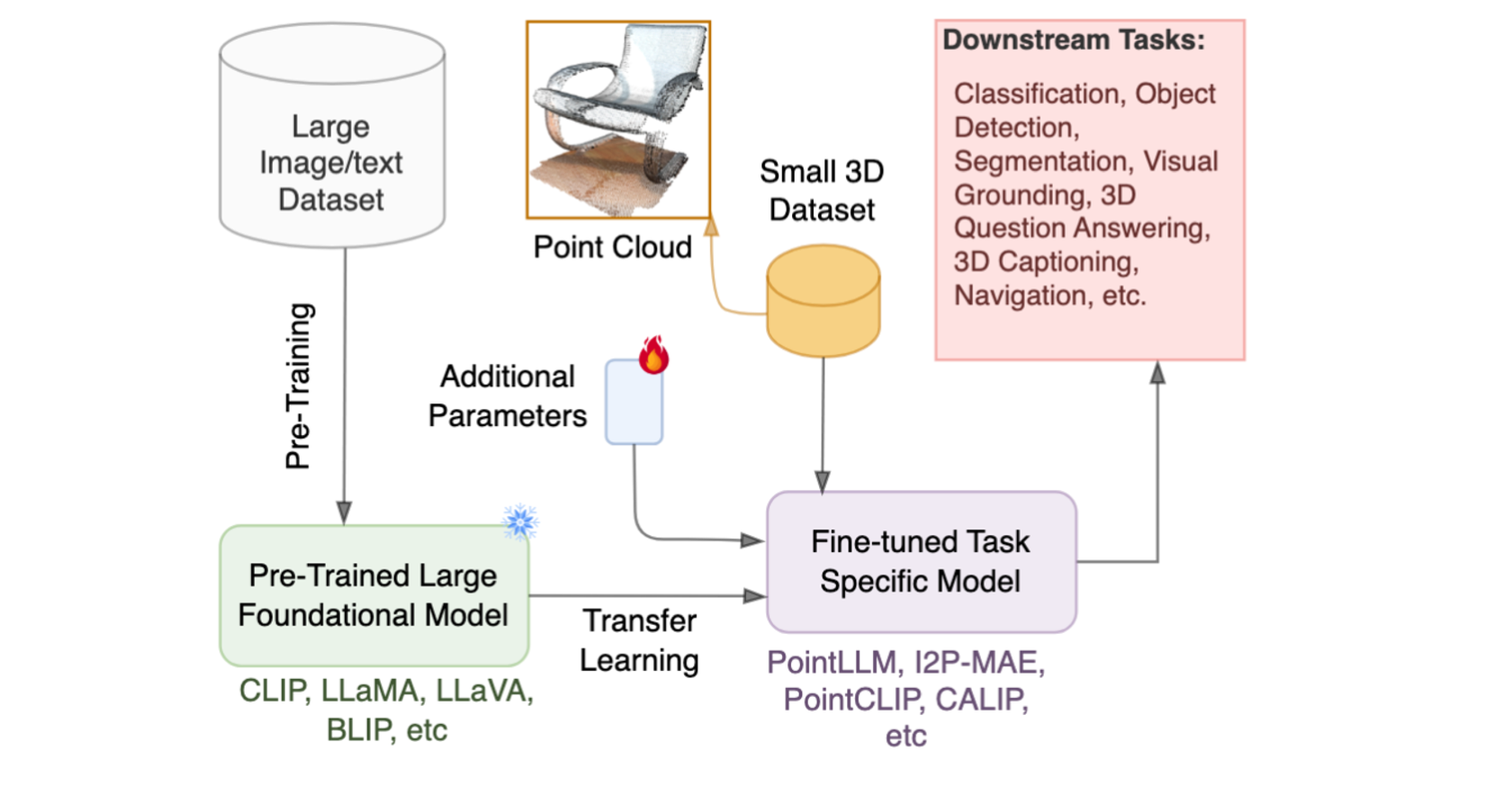
Foundational Models for 3D Point Clouds: A Survey and Outlook
This paper surveys recent advances in foundation models for 3D point cloud understanding, focusing on how 2D and language-based pretrained models help overcome challenges like limited labelled data and high computational costs. It reviews strategies for building 3D FMs, their application across core 3D tasks, and highlights future research directions.
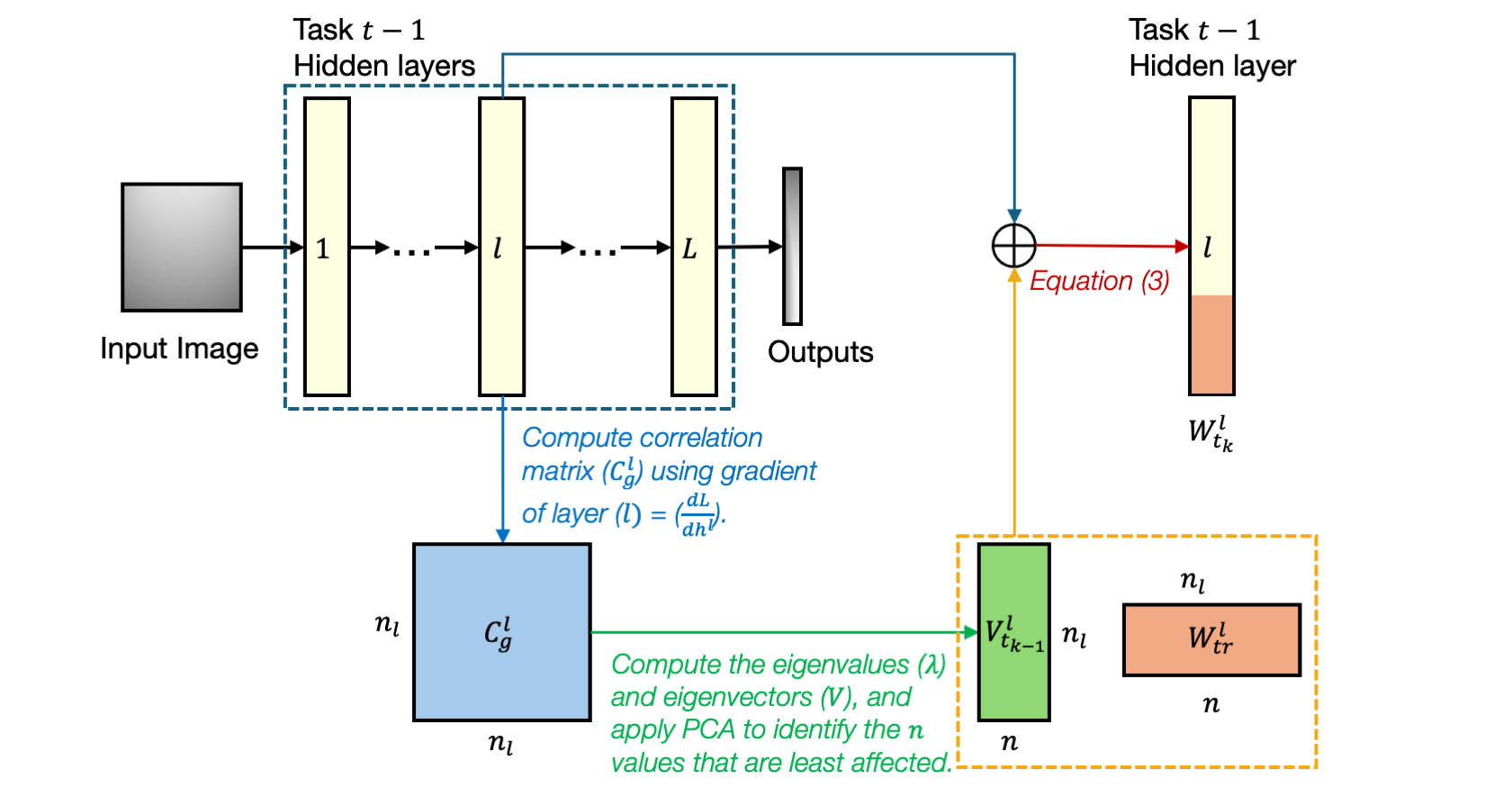
Gradient Correlation Subspace Learning against Catastrophic Forgetting
This paper proposes Gradient Correlation Subspace Learning (GCSL) to address catastrophic forgetting in incremental class learning. GCSL identifies and preserves weight subspaces least affected by prior tasks, projecting new task updates into them, and can be flexibly applied across network layers and tasks.
🎖 Honours and Awards
- 🏆 Best Paper Award, European Conference on Computer Vision (ECCV), 2022
- ✈️ Alan Turing Mobility Grant, August 2024 – December 2025
📖 Education
University of Surrey (UK) & University of Wollongong (Australia)
Joint PhD, Computer Science Sep 2023 – Present
- Research: Few-shot & Incremental 3D Scene Understanding
- Focus: Vision-Language Models, Efficient Learning, 3D Computer Vision
SGGS Institute of Engineering and Technology Nanded, India
B.Tech, Electronics and Telecommunication Engineering Jul 2015 – May 2019
- Graduated with First Class Honours
- Relevant Coursework: Deep Learning, Computer Vision, Data Structures, Robotics